Preliminary Robot
The robot we used before our second Qualifier.
CAD
See the embedded full CAD model of our preliminary robot. We create our model in PTC Creo.

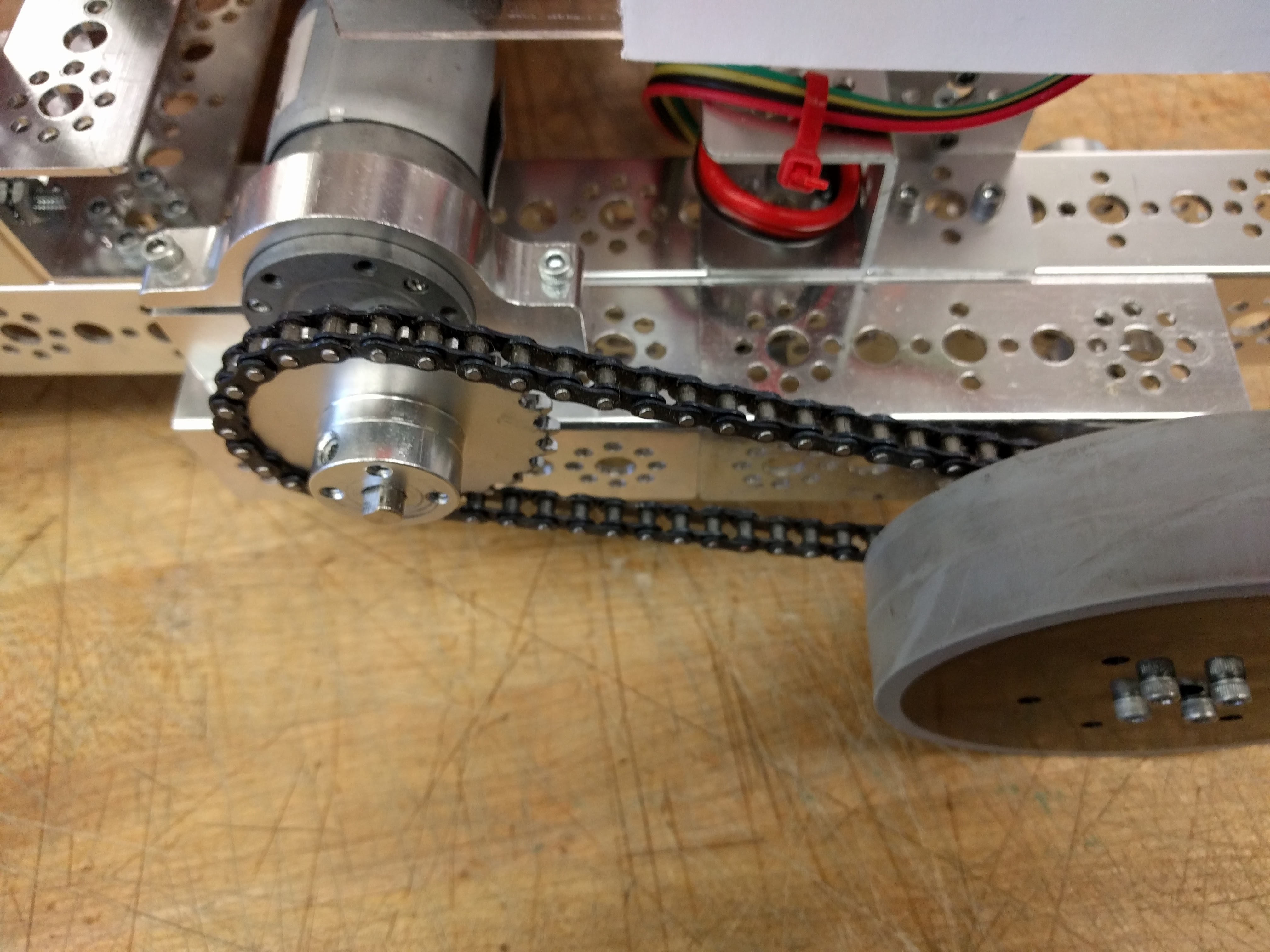
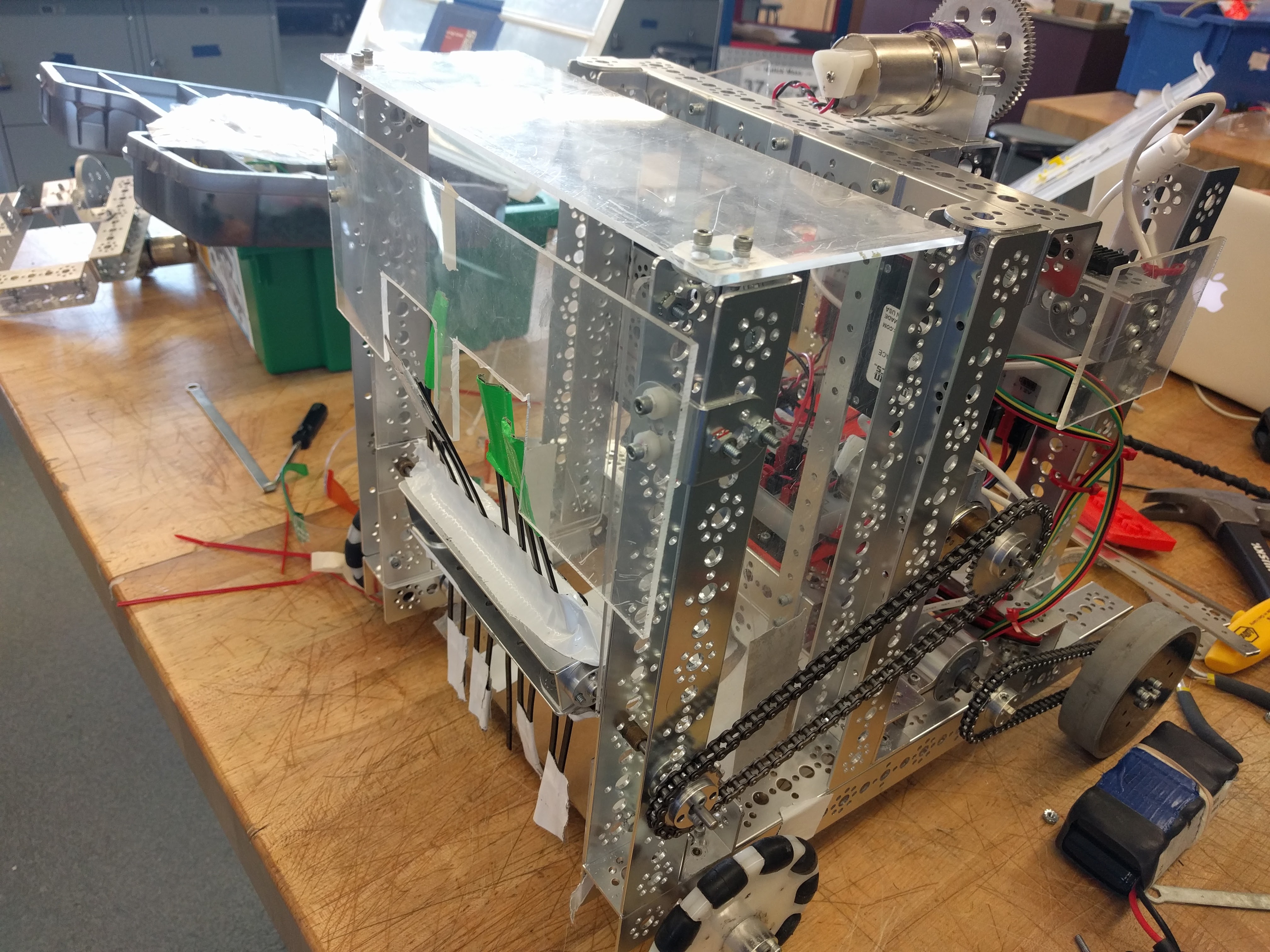
Drive system
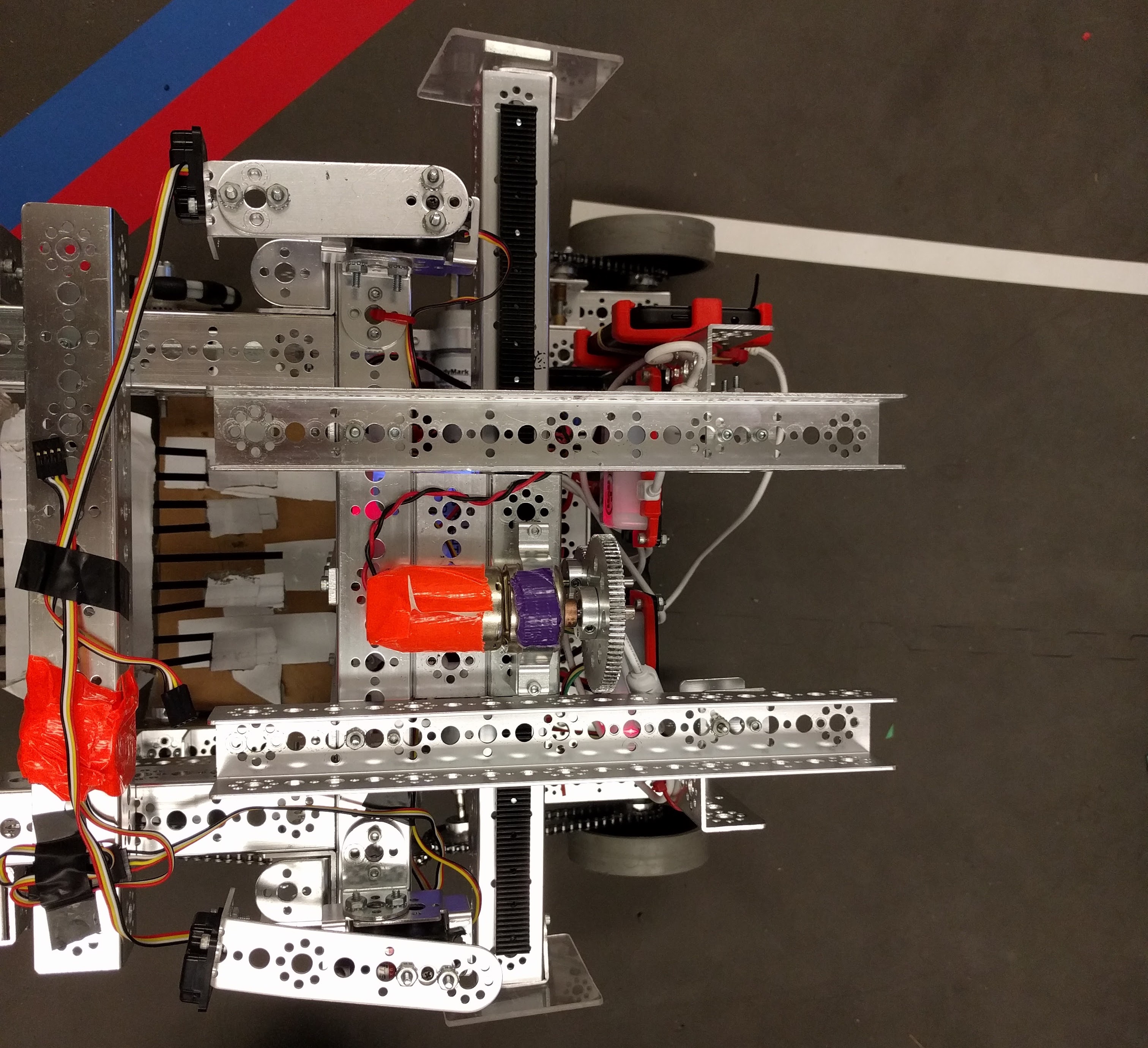
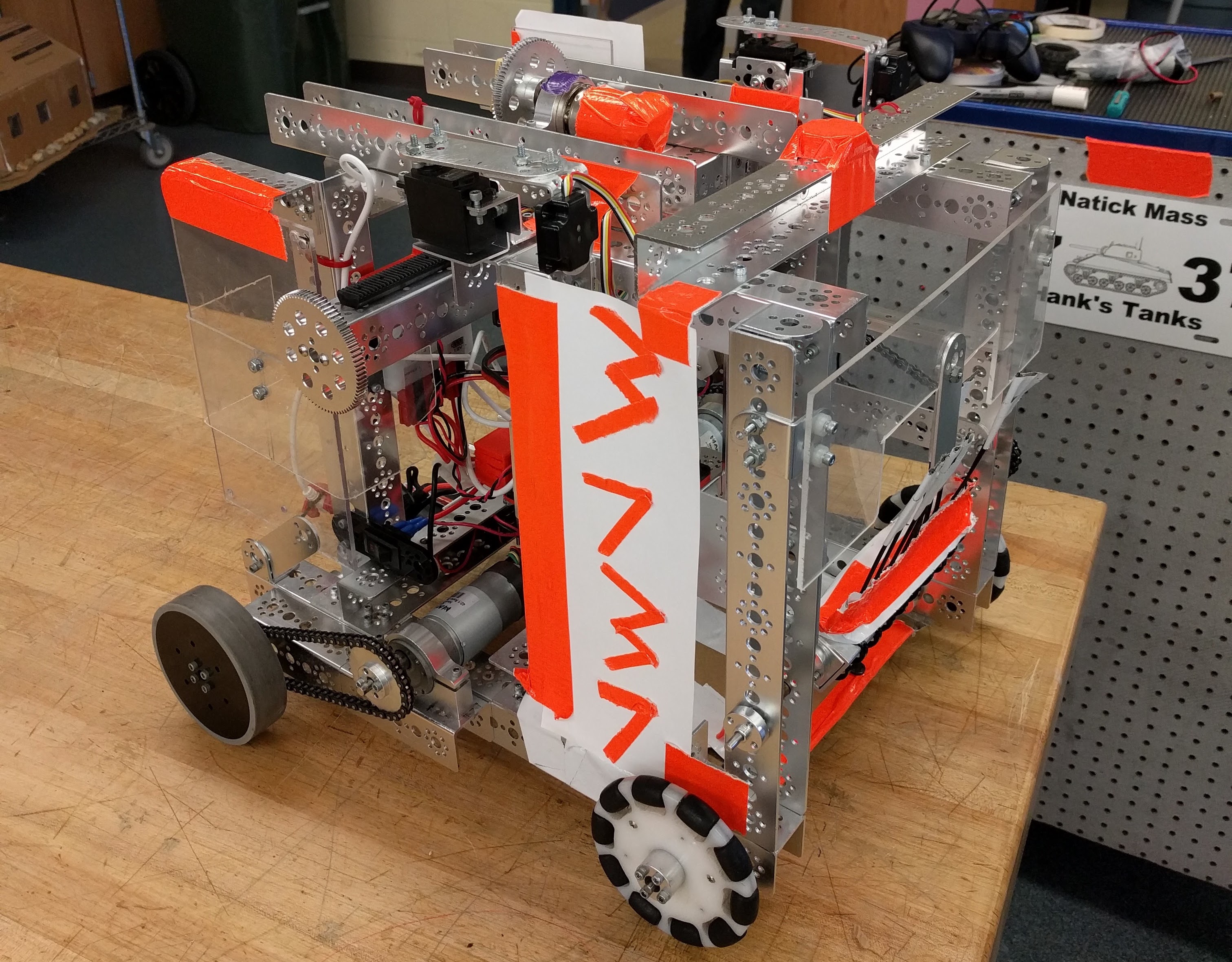
The drive system of our current robot is a simple two motor, hybrid system, with two stealth wheels in the back, and two omni wheels in the front. The two stealth wheals are each geared to a NeveRest 40 motor 1:1.5 for speed, allowing for a fast robot. The stealth wheels are also each moved out an inch further than the rest of the chassis to allow for better turning.
Harvester
Our harvester system, or particle box as we like to call it, consists of a zip-tie harvester in the front leading into a closed box. The box is able to hold up to 5 particles, and by driving up the the corner vortex and running the harvester in reverse, we are able to quickly score them. With the combination of our fast drive and quick harvester, we are able to effectively score many runs in the corner vortex.
Button pusher
Our button pushing system consists of a rack and pinion system geared to a tetrix motor 1:2 for speed. It is mounted perpendicular to the direction we drive, allowing us to drive up alongside the beacons and push them quickly, then move on to the next. With this, we can very quickly push all the beacons in a row. We use this system in autonomous to push both beacons then as well.