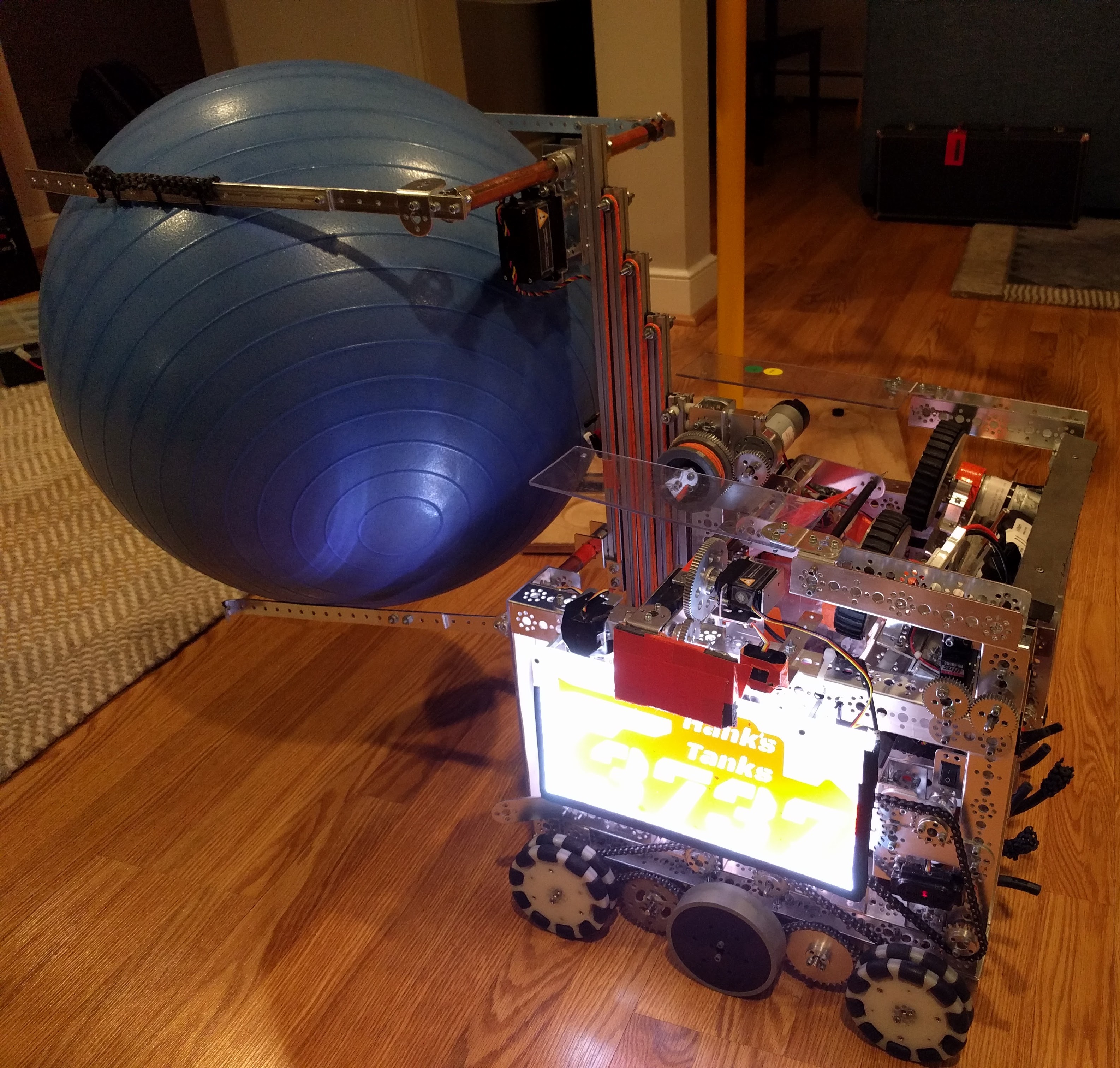
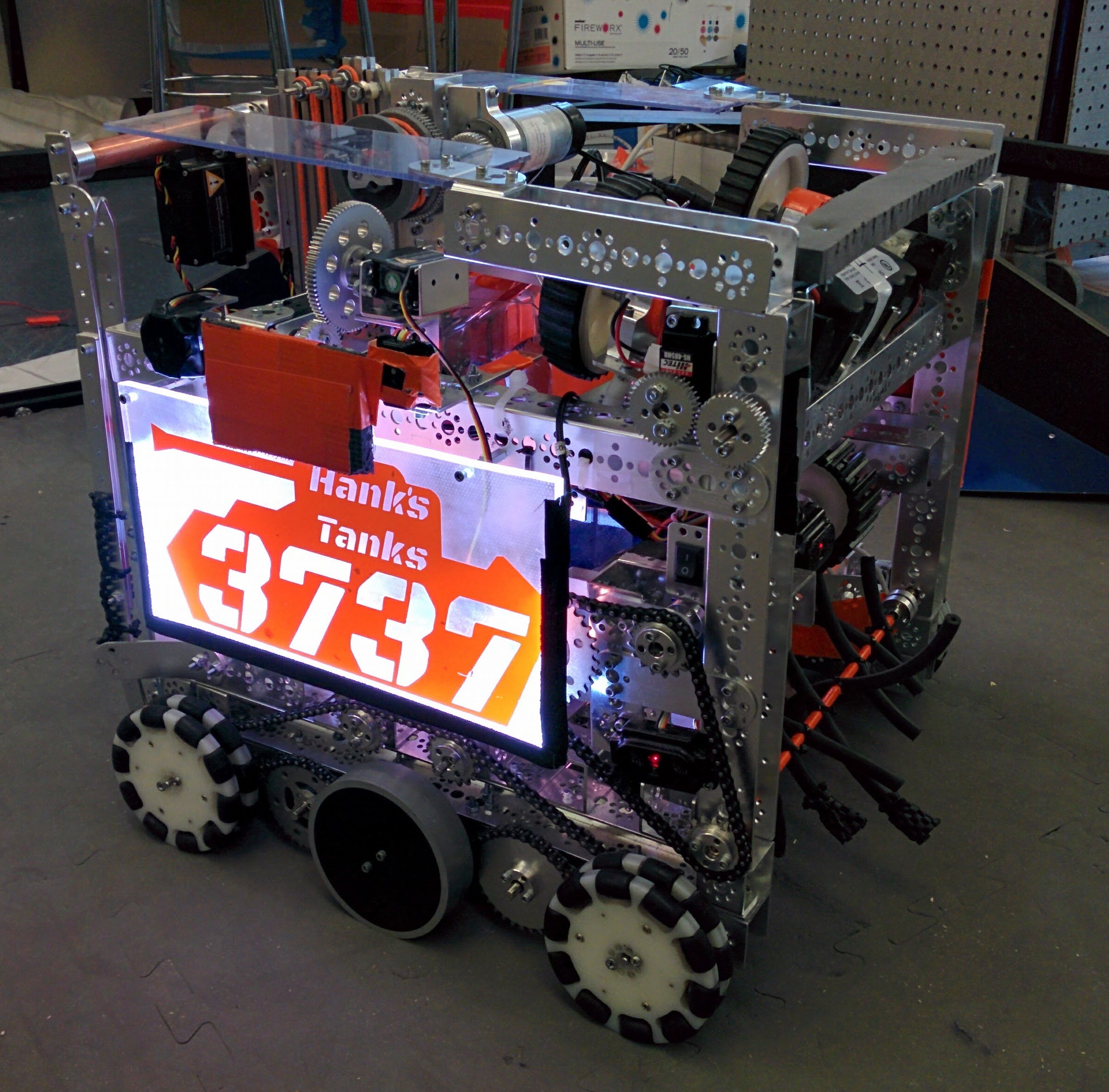
Final Robot
The robot we are using starting with our second Qualifier.
CAD
See the embedded full CAD model of our final robot. We create our model in PTC Creo.

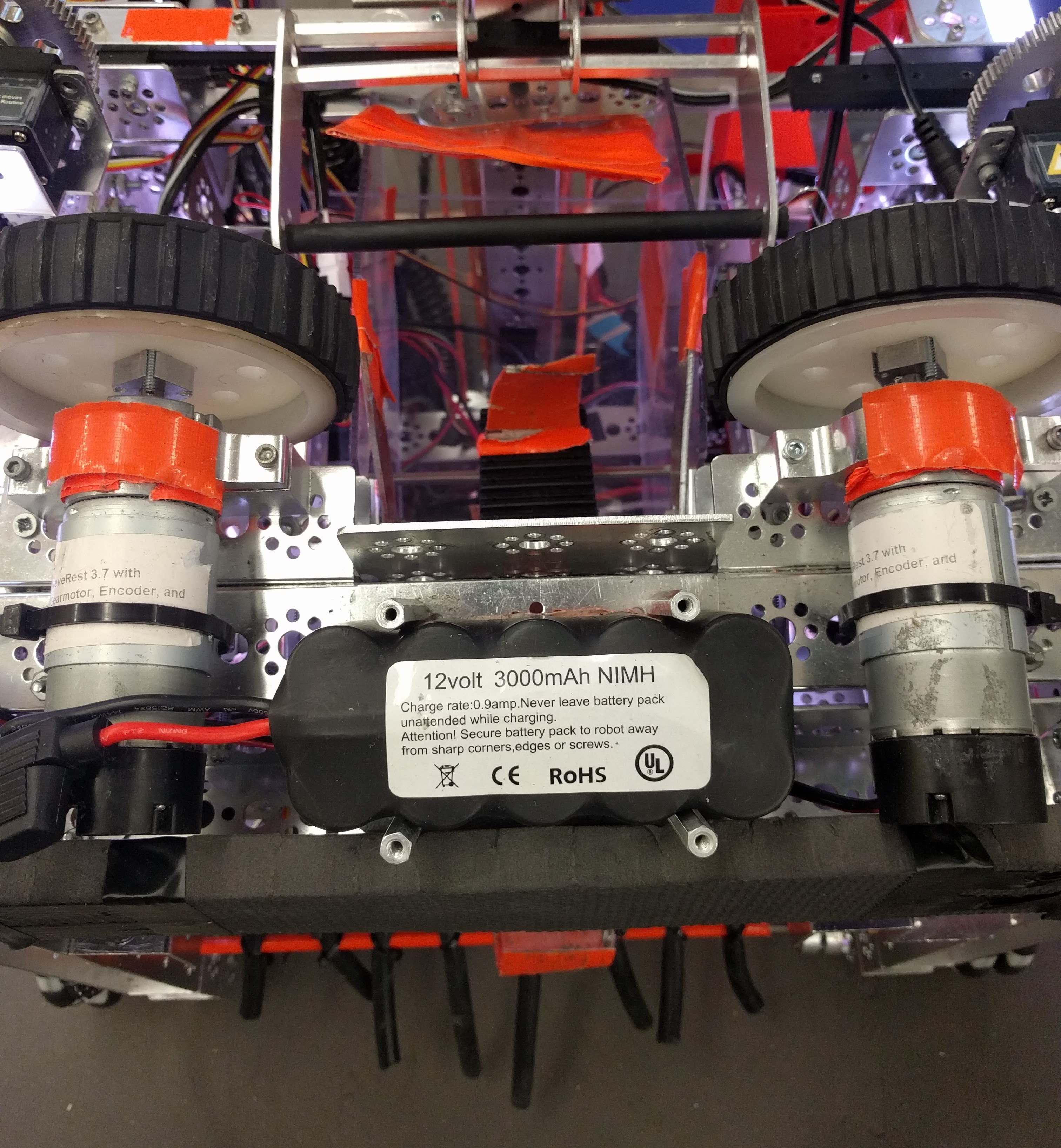
Drive system
Our drive system uses 4 NeveRest 40 motors geared 2:1 for speed and chained directly to 6 wheels, 2 grey stealth wheels and 4 omniwheels. With the stealth wheels in the middle on each side, and the omniwheels on the end, our robot has great traction, as well as incredibly fast turning. As Velocity Vortex is a fast game, the geared NeveRest 40 motors allow our robot to zip around the field very fast. In order to keep all motors on track together, and minimize the space of the drive system, we use large sprockets on all motors and wheels, and chain them together in an over-under pattern. The large sprockets allow for sufficient contact between the chain and the sprockets, as well as more efficient use of space than other methods for chaining all the wheels and motors together on one side.

Button pushers
Our robot uses a continuous rotation servo geared 2:1 for speed to power a rack-and-pinion button pusher on the side of our robot for autonomous. Positioned between two color sensors, it accurately presses the correct button in autonomous. During tele-op, we use a foam bar that drops down using a servo on the front of our robot for quick and easy button pushing. Its softness allows us to easily push the buttons despite the curvature of the beacon, and because it sticks out from our frame, it easily pushes the buttons without having any other part of our robot get in the way.

Particle shooting system
Our ball shooting and collecting mechanism has two main stages, the collecting system and the shooting system. The collecting system has a wide harvester in the front to initially bring particles into our robot, and then a conveyor belt in a triangular shape with flaps, wide enough for one particle. This triangular shape makes the particles wrap around in a curved container, feeding them directly from the harvester into the shooting system. By running this system, geared 2:1 for speed, we are able to collect and hold up to 5 particles. Once we have collected as many particles as we can, we start up the shooting system, two parallel flywheels mounted on NeveRest 3.7 gear motors, and by running the collecting system at full speed, send all the particles through the flywheels accurately and quickly.
Cap ball lifter
Our cap ball system uses a 4-stage misumi extrusion system with a REV linear slide kit as the linear slide system. Using a single NeveRest 60 motor geared 1:2 for torque to power the spool that raises the first stage, and then cascading slides to power the next 3, we are able to lift the cap ball over the vortex in a matter of seconds. It is only strung on one side, as the other side has side-mounted supports to help stabilize the system. Using a copper pipe running through the last stage with forks on the ends and a clamp on top to keep the cap ball in place, we pick the cap ball up with a forklift-like mechanism. Because of the extra height the slide system allows us, we are able to get comfortably over the vortex, enough to allow for the bottom fork to be slightly slanted down. By releasing the top clamp, the cap ball rolls off the fork and right into the vortex. This is a much quicker cap than placing the ball by lowering the slides.